被热捧的自动驾驶到底是什么 以及它的前世今生
2016.08.29 11:30
信息技术发展具有20年的周期律:1970~1990年是发轫于PC的数字化,1990~2010年是互联网推动的网络化,从2010年开始的20年,我们面临的将是机器智能的寒武纪大爆发。如果物联网是机器的“视觉”,互联网就如地壳运动一样导致“互联网+”应用的涌现,而大数据是钙元素,演化出机器智能。
人工智能目前炙手可热,创业公司如雨后春笋般涌现。从业者开始思考,如何让技术形成涟漪效应,促使产业非线性、跃迁式增长。有人把人工智能和产业比喻成葡萄干和面包的关系,虽然葡萄干离开面包仍是葡萄干,但两者结合在一起就能创造出高价值的新品类。笔者近年来一直在探索人工智能的产业机会,并得出结论:最近5~10年,自动驾驶是人工智能带来的增值最大的产业,没有之一。
什么是自动驾驶?
自动驾驶是个笼统的概念,涵盖驾驶辅助(driving assistance)和自动驾驶。驾驶辅助还是由人开车,智能体现在对环境的感知,并适时预警(比如车道线偏离以及与前车碰撞预警)。
从驾驶辅助到自动驾驶是很大的飞跃。自动驾驶在感知以外,加上了规划/决策和控制。驾驶辅助的感知强调低误报、低频触发,人是最终的决策者,所以驾驶辅助出错无伤大雅。自动驾驶的感知有极高的要求,因为把一段时间的控制权完全交与了机器,不仅要求低误报,而且要求零漏报,漏一次就会造成交通事故。
自动驾驶有三种不同的形态:(1)辅助驾驶或半自动驾驶,特斯拉的autopilot即是此类。在某些场景下汽车可以进行自动驾驶,比如紧急刹车,在封闭、结构化道路上的自适应巡航和车道保持,自动泊车。必须注意的是,这类技术目前还有较大的局限性,特斯拉近日的多起事故都是出现在十字路口、入口/出口和双向路上,这超出了autopilot的处理能力。(2)高度自动驾驶,在大街小巷多数场景下可以自动驾驶,还能支持多辆车的编队行驶。这类技术的环境感知和驾驶认知能力相比辅助驾驶有极大的提升,不仅能处理上述autopilot不会处理的路况,甚至还能在完全没有车道线的非结构化道路上畅行。高度自动驾驶汽车还能在复杂路况下与其他智能车辆或人驾驶的车辆共享或竞争路权。(3)全自主驾驶或无人驾驶,完全由人工智能来驾驶,可以把方向盘、油门和刹车去掉。
未来5年,传统车厂和零部件供应商的主要努力方向是第一类和第二类自动驾驶,但这并不是以代替驾驶员为目的,而是让驾驶员更加安全和舒适。显然这是更稳妥的渐进道路。而一些“野蛮人”直接选择了无人驾驶作为切入点,剑指2020年。他们认为前两种自动驾驶是危险的,因为机器失效时,在突现危机的电光石火中驾驶员不一定能立刻进入状态,做出清醒的决策。所以终极的办法是“消灭”驾驶员。这样的汽车是真正为出行者设计的,小孩、老人、宠物、残疾人都能够开车,出行权利得到极大释放。
自动驾驶的前世:科研开道

大众帕萨特研发无人驾驶汽车,该车成功进入DARPA城区挑战赛
自动驾驶最早的原型可能要算“斯坦福车”,这个20世纪60年代获得美国国家航空航天局(NASA)资助的项目在汉斯·莫拉维克(Hans Moravec)——被誉为“人工智能最坚定的支持者”——的努力下取得了巨大进展。莫拉维克通过远程图像来操控“斯坦福车”的运行,然而它逃脱了控制,直接驶上了繁忙的道路,追捕“叛逃机器人”成为无人车历史上诙谐的一笔。莫拉维克在机器视觉的探索中遭遇了很多挫折,后来有了著名的莫拉维克悖论(Moravec’s Paradox)——人类的高阶智能,比如推理、规划和下棋,计算机都能够轻易实现。而只有几个月大的婴儿就能驾轻就熟的低阶智能,如感知和运动配合,计算机都遥不可及。
美国国防部高级研究计划署(DARPA)为降低未来战争中士兵的伤亡,在2004年举办了第一届无人车“大挑战(Grand Challenge)”,可惜在沙漠中全军覆没。而随后的2005年成为了一段光辉岁月。卡内基梅隆大学的Red队是夺冠热门,其老大、机器人专家雷德·惠塔克(Red Whittaker)志在必得。在挑战者中,斯坦福大学的Stanley并不起眼,可是领队塞巴斯蒂安·特龙(Sebastian Thrun)矢志夺魁,这位同步定位与地图创建(SLAM)的先驱者从卡内基梅隆大学失意出走,试图在这场比赛中夺回尊严。卡内基梅隆大学的两辆车一路领先,可下半程几个松动的零件导致两辆车大幅减速,只获得第二和第三。Stanley虽然在比赛中出了几次事故,但未伤筋动骨,在删除了一些无关紧要的代码后竟然越跑越快,最终斩获200万美元奖金。在这次比赛中,很多车辆都使用了激光雷达、高精度的地理信息系统和惯性导航系统,直到今天仍然是很多无人车的标准配置。
2007年“城市挑战赛(Urban Challenge)”在卡内基梅隆大学卷土重来,这次他们准备充分,40人的队伍,除了两辆参赛的车辆,还有一辆补给车提供充足的零件替换。惠塔克终于摘得桂冠。在他的装备库里,第一次出现了一种新型的64线激光雷达,为了让这件装备投入使用,卡内基梅隆大学的工程师写了大量的驱动程序。这是由一家音箱厂商Velodyne的极客老板做出的,价值7~8万美元。在其后的近10年间,64线激光雷达成为全世界绝大多数无人车必须配置的组件。
自动驾驶的今生:企业精耕

谷歌无人车
谷歌的第一辆无人车是基于混电车Prius改装的,顶上装着64线激光雷达,以此建立高分辨率的三维环境模型或高精度地图。
谷歌的第二代无人驾驶车来自叫510 SYSTEMS的一个创业公司,其核心技术是Anthony Levandowski,是加州大学伯克利分校开发的,并非出自无人驾驶车三强(卡内基梅隆大学、斯坦福大学和麻省理工学院)。这家创业公司做的东西非常好,于是谷歌悄悄把这家公司买了下来,在其基础上开发出基于丰田Lexus的平台,一直到现在Lexus仍然是谷歌车队的主流车型,现在常在路上行驶的有20多辆。
谷歌的第三代无人驾驶车是真正的跃迁,这款车是完全重新设计的,做了很多思考和改进,比如移除了雨刷,因为并不需要有驾驶员在雨中看清路况。按照设计,这种车是没有方向盘的,但由于加州法律的限制,车里还是安装了一个游戏操纵杆作为方向盘。目前在路上行驶的这种车已有30多辆,同时谷歌还在进行大量的制造。
虽然谷歌的几十辆无人驾驶车累积的行程已达200多万英里,然而在实用性上面临着一定的问题:一是激光雷达等传感器太过昂贵,二是区区200多万英里不能证明无人驾驶足够安全或比人驾驶得更好。
另一条路线逐渐成为主流,他们从驾驶辅助和辅助驾驶开始,主攻以视觉为主的低价方案,试图实现快速商业化。其中翘楚是Mobileye和特斯拉,Mobileye的驾驶辅助系统已经安装在1000多万辆汽车上,而特斯拉的autopilot在短短7个月积累了1.3亿英里的自动驾驶里程。
Mobileye采用视觉地图,从视觉中提取的地图特别小,适合实时上传、通过众包的方式更新。事实上基于视觉的定位更接近于人的工作方式。我们根据道路上的标志来评估大致的位置,并且根据路面线条的变化做实时的决策(选哪一条车道,是否上匝道等)。那么,只须从视觉中提取出那些标志和线条,众包上传到地图(每公里只需10KB级别的数据),而行驶时可以通过视觉匹配来获得定位。
在视觉技术狂飙猛进的同时,其他技术也在飞速发展,比如视觉加雷达的多传感器融合,在很多场合下能够获得更好的感知能力。视觉的优势是分辨率高,包含丰富的语义,缺点是容易受天气和光照影响;毫米波雷达只能跟踪对象,而无法获知其大小形状,但受环境影响小。两者的融合已经成为目前辅助驾驶的标配,特斯拉的autopilot即是如此(它还有短距离的超声波雷达)。
值得一提的是,特斯拉出现了致死事故。在事故中纵然有Mobileye视觉未能识别出拖车横侧面的缘故,但也有雷达识别失误的问题。雷达安装较低,垂直扫描角度小,只能在较远的距离看到拖车(拖车底盘高,所以近距离时无法扫描到),在这起事故中拖车被认成“龙门”或横跨马路的交通标志。目前,各个传感器通常只能在各自识别完成后融合,而这时候的融合逻辑变得非常困难,因此,多传感器的底层、深层融合非常值得探索。目前已经实现雷达和摄像头的合体RACAM,以及激光雷达和摄像头的“混血”版。
除了感知,在规划和控制方面也有了长足的发展。传统的规划考虑的是安全和舒适性,而现在把竞争性也加入了考量。自动驾驶的车辆如何预测行人和其他车辆的动机和动作?如何积极地并线来获得路权?谷歌和Mobileye等都在尝试新的算法,比如采用强化学习和递归神经网络,试图用深度学习的端到端学习,整体解决感知-规划-控制的所有问题。必须指出,机器学习和专家知识是可以互补的。年初曾发生谷歌自动驾驶车撞上大巴的事故,如果在规划中融入对大巴驾驶员判断的经验,则可能规避此事故。
网联的未来
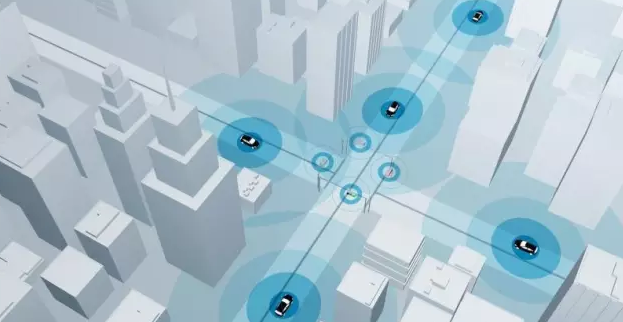
在相当长的一段时间里,自动驾驶车将与有人驾驶车共享路权,单车智能是必要的基础。但自动驾驶的未来不是一辆车在战斗。随着5G通信网络的普及,V2X(包括车对车和车与基础设施的通信)将丰富自动驾驶的技术内涵和生态,并放大其作用。V2X能做什么?首先是安全。假设车车之间有通信,第一辆车发生制动的瞬间,后车连续接到指令,自动刹车,就可以将大祸消弭于无形。
V2X能提高能源利用效率。欧洲已经开始尝试大货车的编队行驶,领航车的执行动作通过V2X指令传播到跟随车辆,使整个车队的队形和操控保持一致,这样做最大的好处是后车风阻减少,可大大节省能源。
V2X还能提升通行效率。现在高速公路上的一大问题是,只要有一辆车突然刹车,就将如地震波一般连绵传播数公里,使整条道路的通行效率剧减。麻省理工学院的教授发现,假设V2X允许每辆车的速度控制在前后车速度的平均值,某车瞬间减速的影响会向其前后两侧传播,并且迅速消失。如果V2X能够掌握路口各个方向的车辆运行状况,并且计算出每一辆车的通行顺序和速度,那么完全可以把红绿灯去掉,各车按序行驶,完全不用担心撞车。当这一天实现时,城区的通行速度将至少提升1~2倍。
自动驾驶产业和社会变革

自动驾驶风起汽车产业,这个被称为“工业之王”的产业过去100年在竞争格局上并没有大的变化,一辆车需要3万多零件,价值链和资金周转周期长,巨头林立,后来者只能知难而退。然而过去5年产生的四个趋势完全颠覆了这一格局:新能源化,像特斯拉这样的电动车将零件数降到了1万个,进入者的门槛极大地降低;出行多样化,尤其共享出行改变了汽车的消费模式;智能化和网联化改变了汽车的定义,电子和软件压倒传统机械和电气,汽车成为移动的智能化空间,在这里人与信息和服务产生无数的触点。
自动驾驶产业涉及三个万亿美元的市场:全球汽车市场万亿美元,出行市场万亿美元;在实际产业之外,自动驾驶为社会经济带来的额外收益也将是万亿美元。摩根斯坦利的研究报告[1]指出,自动驾驶每年将为美国带来1.3万亿美元的收益,分别来自燃油节省、拥堵减缓、事故减少和生产力提升。
竞争格局的改变并不只是有利于后来者。传统的汽车产业巨头比以往任何时候都更勇于拥抱新趋势:通用汽车投资出行服务提供商Lyft,掷下10多亿美元买下创业公司Cruise Automation;国内长安汽车已有具有辅助驾驶功能的汽车行驶2000公里进京,并与谷歌等国外巨头积极接触。从这些都可以看出他们直面挑战的决心。
自动驾驶带来的变化远远不止是汽车产业,它的高级形态——无人驾驶——将彻底改变出行。10年后,路上川流不息的出租车大多数是无人驾驶,汽车数量减少一半,但汽车的利用率得到极大提升,堵车将成为过去,天空重归于蓝,停车位被改成公园、活动空间和住所,车祸几近于零。
交通流、信息流、能源流三流合一,所有与人或物相关的交通将被重新定义,保险需要涅槃重生,而服务业将找到新的爆发点——上述的无人驾驶出租车是除了家和办公室的第三空间,是移动的商业地产、移动的影院、移动的办公空间、移动的咖啡馆。
自动驾驶:安全第一

汉语“安全”在自动驾驶语境里有两层意思。第一层是Safety(安全)。例如传感器360度无死角覆盖、多种传感器融合、感知算法精准、感知-控制反馈实时、软硬件多层冗余、温度范围大、防震、防尘等。汽车行业对功能安全也有ISO 26262标准,整个流程执行下来会让IT工程师“易筋洗髓”、脱一层皮。第二层是Security(保密)。一方面,日益复杂的算法和功能要求通用操作系统能够在车上使用;另一方面,联网的需求使汽车直接暴露在网络上,黑客通过车载联网娱乐系统可以轻松攻破并控制汽车。
如何破解安全风险?第一,要仔细梳理和定义自动驾驶系统的安全需求,进行风险分析,建立具有可信计算基础的软硬件平台,采用分域、虚拟化等机制隔离关键模块,通过加密保护端到端的数据通路。第二,要实践全新的安全设计方法学,安全始于设计,从确认设计到验证实现,都要考量安全性;在运行时,是否足够安全,能否抵御攻击,能否在线升级、保证软件最新,系统出现单点故障是否有足够的冗余?万一系统沦陷,有没有办法强力终止攻击,或重获控制权。第三,如果未来存在一个安全信息市场,安全研究人员或白帽黑客发现安全缺陷,可以通过市场将该信息卖给主机厂商或技术供应商。
特斯拉在致命车祸的抗辩中指出,autopilot已经行驶1.3亿英里,这是第一起致死事故,而世界范围内每行驶6000万英里就有一次致死事故,全美的平均数字是9400万英里,因此自动驾驶更加安全。虽然笔者是自动驾驶的拥趸,但必须指出,这一论据并不充分。1.3亿英里、不到1年的上路时间、10万辆左右的数量,这是非常小的数据样本。换言之,只要特斯拉明天再出一起致死事故,拿美国均值做标准就不及格了。
著名智库兰德公司的研究报告[2]指出,要在数学意义上证明自动驾驶比人驾驶更安全,需要测试上百亿英里、几百年的时间。这是全世界任何一个车厂都无法完成的任务。人们不会因为某家车厂没有达到理论上的低死亡率而不尝试自动驾驶。但如果某家车厂能够用更多的里程来证明自动驾驶更安全,则毫无疑问将获得更多的青睐。谷歌的自动驾驶团队开发出模拟器,1天能够虚拟行驶300多万英里,这可能是达到兰德公司目标的唯一途径。
法律、法规和政策是桎梏吗?

制约自动驾驶迅速普及的因素包括技术成熟度、成本和法律法规,而第三者是最大的拦路虎。在美国和欧洲,巨大的游说力量在推动改革。美国交通部及国家公路交通安全管理局(NHTSA)已经开始建议无人驾驶的合法化。他们采用了一个绝妙的方法,在所有交通相关的法律里,“驾驶员”都可以用具有人工智能的机器替换,使整个法律体系为无人驾驶敞开大门。当然,各州需要各自制定可操作的法律法规框架。目前,美国有四个州和一个特区已经允许自动驾驶汽车上路,但多数仍然要求驾驶员在位。总体而言,未来走势非常乐观。
在世界范围内,《维也纳道路公约》也有了历史性的突破,原来《公约》要求驾驶员时刻保持对车辆的控制,而在2014年,《公约》批准了有关自动驾驶的修改,只要其能够“被驾驶员权限否决或接管”。修改的生效仍需时日,欧洲没有美国激进(因为欧洲的大车厂在短期内都回避无人驾驶)。中国并非《公约》的缔约国,但中央和地方政府都对自动驾驶寄予了厚望,对于法律法规的进展,我们的判断是先慢后快。
那么什么样的自动驾驶车可以上路测试和销售呢?在美国加州,车厂或技术公司如果要申请自动驾驶汽车上路测试,只须提交一些申请材料,准备500万美元的保险额度,以及有司机/操作员培训计划纲要即可。对于销售,美国国家公路交通安全管理局通常采取事后认证方式,自动驾驶汽车先入市,再颁布标准,如果事后发现产品有重大缺陷,管理局则要求召回。而欧洲和亚洲更加保守,在自动驾驶车型进入市场之前就需要认证,也就是说,自动驾驶汽车需要“考驾照”。欧洲和日本已经致力于建立统一的自动驾驶车型测试标准。但是特斯拉的汽车在销售时是没有自动驾驶功能的,所以并没有经过相关认证,但有一天这个车突然通过远程软件升级能自动驾驶了,那要不要召回并认证?这是摆在欧日管理当局面前的新问题。
自动驾驶的道德伦理问题
当我们谈论道德和伦理的时候,经常有这样的辩论。你说自动驾驶能够带来效率提升、事故减少,他说自动驾驶存在道德和伦理问题。面临危险时,自动驾驶汽车是撞左面的三个人还是右面的一个人,是撞老人还是小孩,是选择戴头盔的摩托车手还是不戴头盔的,是选择牺牲车外的人还是牺牲车里的人?这些问题都有一些逻辑上的陷阱,比如你说撞戴头盔的,原因是戴头盔的比不戴头盔的生存的可能性更大,而别人就会质疑你歧视守法公民。
而对于从业者来说,有更重要的伦理和道德问题需要考虑,比如要正视潜在的利益冲突方和反对者。对于这样一种统计上更安全,但仍有可能犯低级错误的技术,一定有人赞成、有人反对。多数人对“更安全”并没有直接的感受,但只要有一次事故就有可能变为反对者。
1975年,芝加哥大学教授萨姆·佩兹曼(Sam Peltzman)研究指出,安全带和安全气囊实际上导致了更多的交通事故。在新技术发展初期,无论是汽车厂商还是消费者都要有勇气和耐心。对于汽车厂商来说,还需要敬畏和尽责。技术不必完美,先让用户试用,在迭代中慢慢改善。特斯拉是具有极大勇气的先行者,第一次尝试了通过远程升级赋予汽车自动驾驶功能,但是在尽责上可以做得更好,比如在宣传上区分autopilot和无人驾驶,在告知义务上强调beta版软件的不可靠性,在告警义务上更加严格——将注意力不在路上的司机拉回决策环等。
大数据时代,所有企业都会有数据饥饿感,但是收集数据对用户要有告知义务,不能以用户的隐私为代价。这一点特斯拉做了有益的尝试,对于每一段旅程,开始5分钟和最后5分钟的数据是不记录的,这涉及到用户的准确住址或去处。当然不排除在某些地区因为监管需要或不可说的原因而存在软硬件后门,但厂商必须守住底线,有所为有所不为。
自动驾驶是智能感知与传统汽车相结合的创新产物,是汽车行业发展的未来。作为一项变革性的技术,自动驾驶既是创业创新又是社会创新,感知手段和人工智能将是自动驾驶技术决胜的关键。无论是法律、法规和政策,还是道德伦理争论,我们都要有勇气和耐心,呵护无人驾驶的健康发展。热切期待道路不堵、天空很蓝、自由出行的那一天早日到来。

申明:本文为作者投稿或转载,在概念股网 http://www.gainiangu.com/ 上发表,为其独立观点。不代表本网立场,不代表本网赞同其观点,亦不对其真实性负责,投资决策请建立在独立思考之上。